
「專案筆記」HighDynamicRange-Imaging
Collaborate with Yen @pnf4665jds
成果
夜城 @象山
原圖

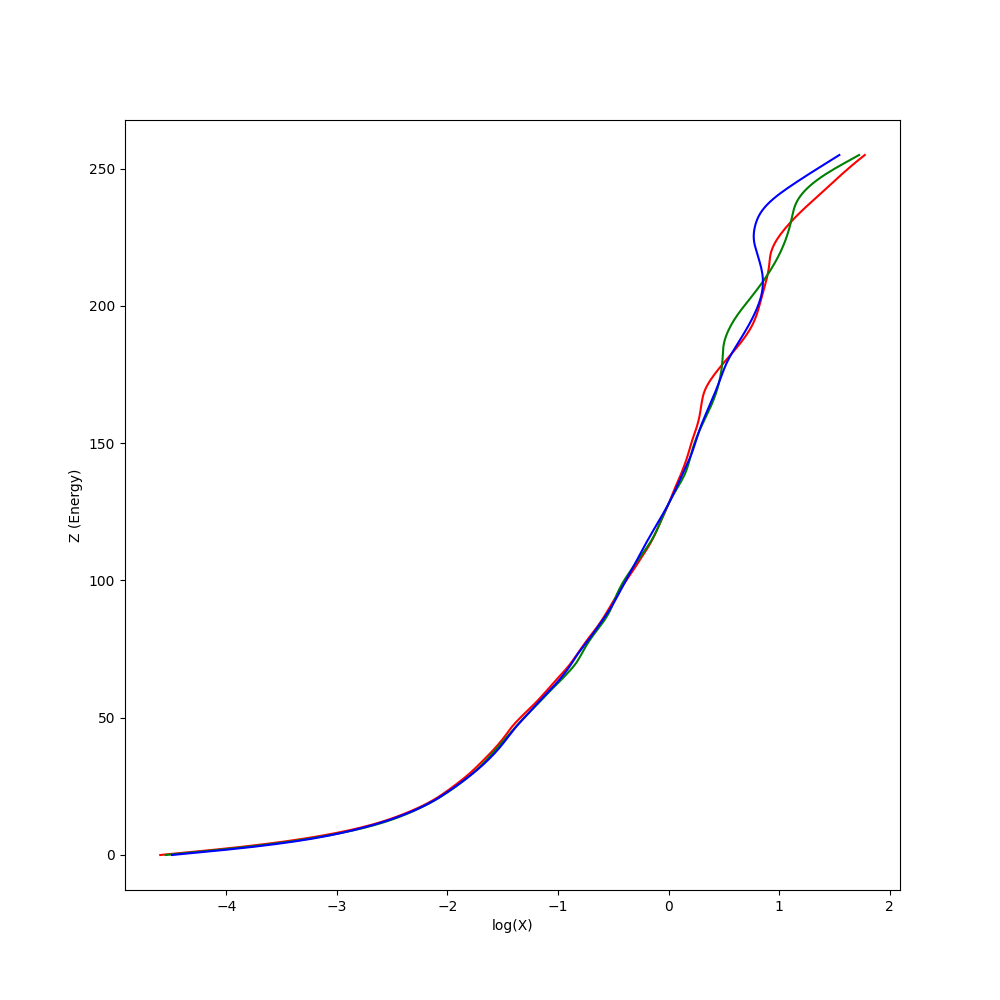
Response Curve
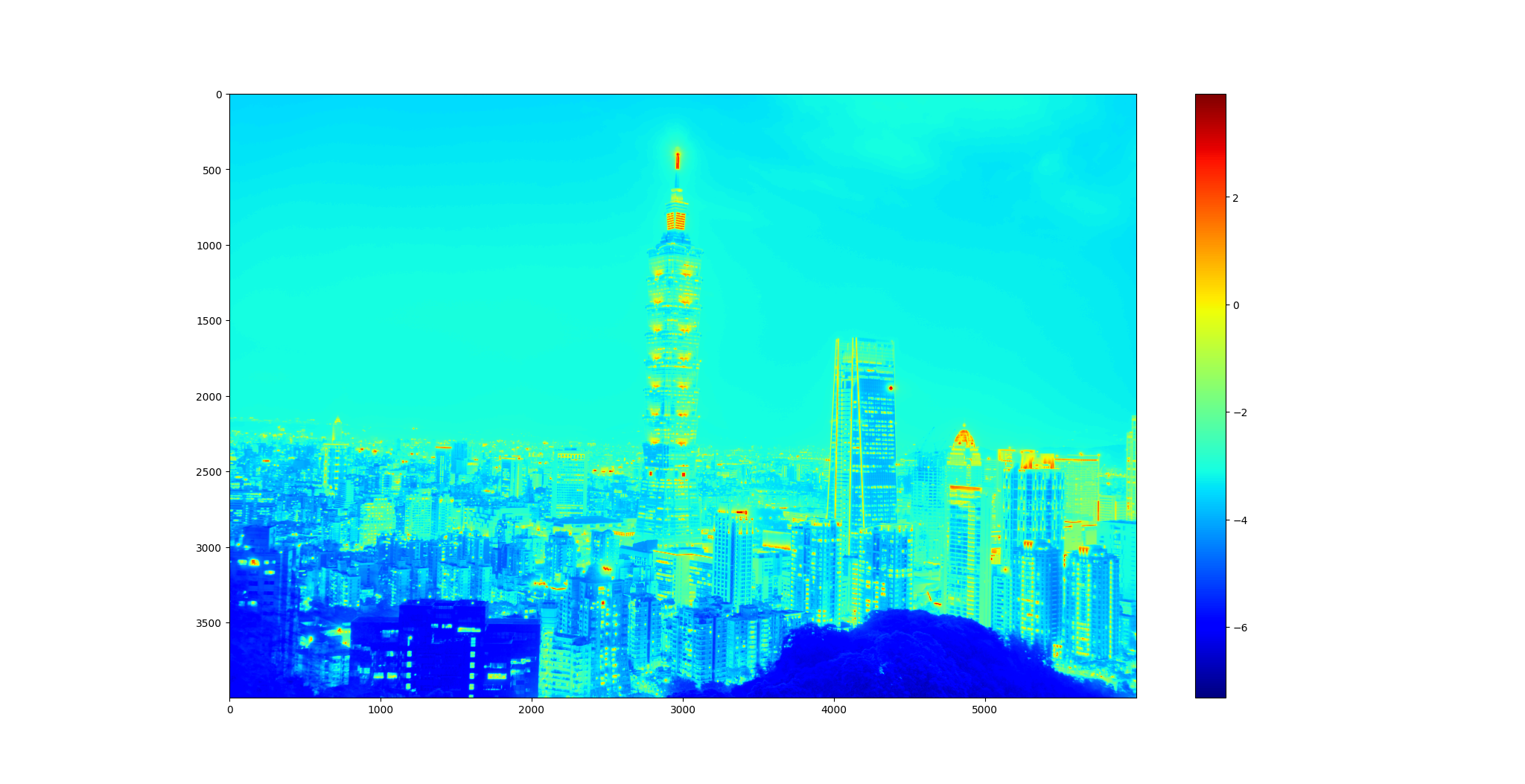
Radiance Map
HDR 結果

曾經風光的巨輪 @基隆港
原圖

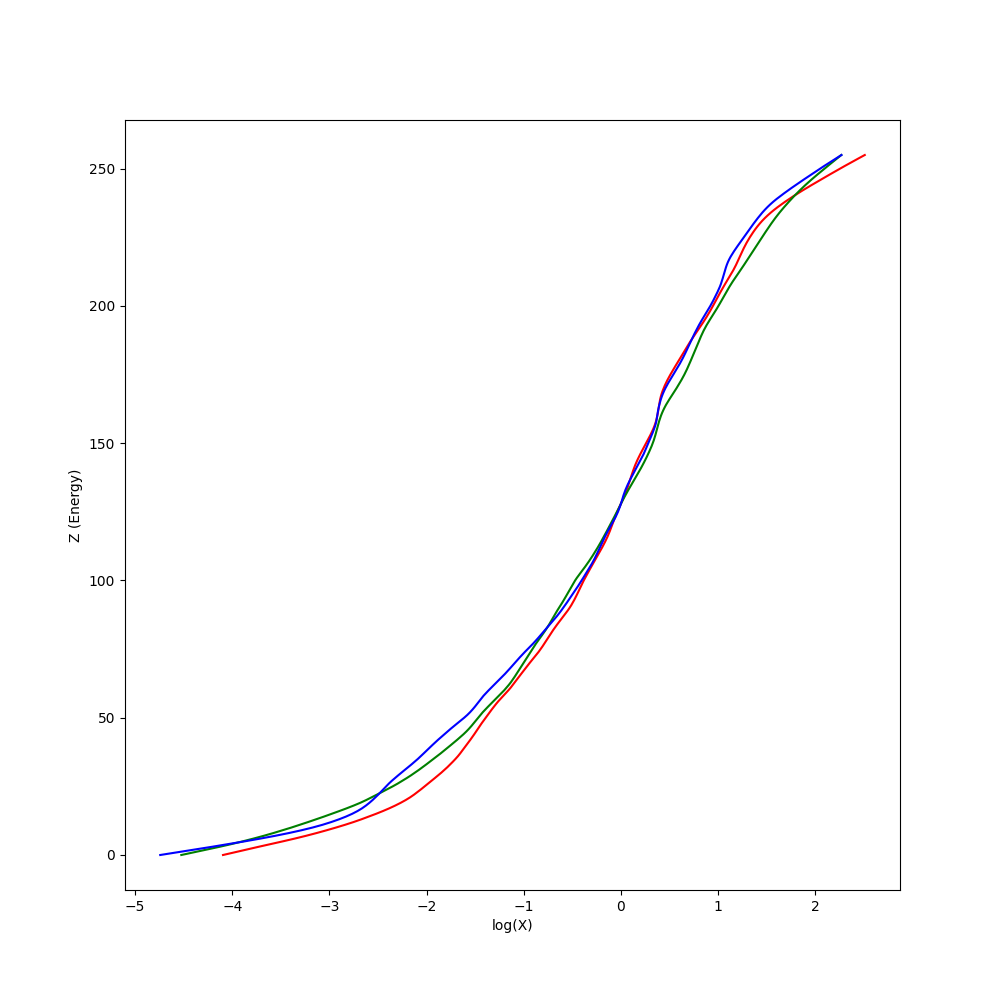
Response Curve
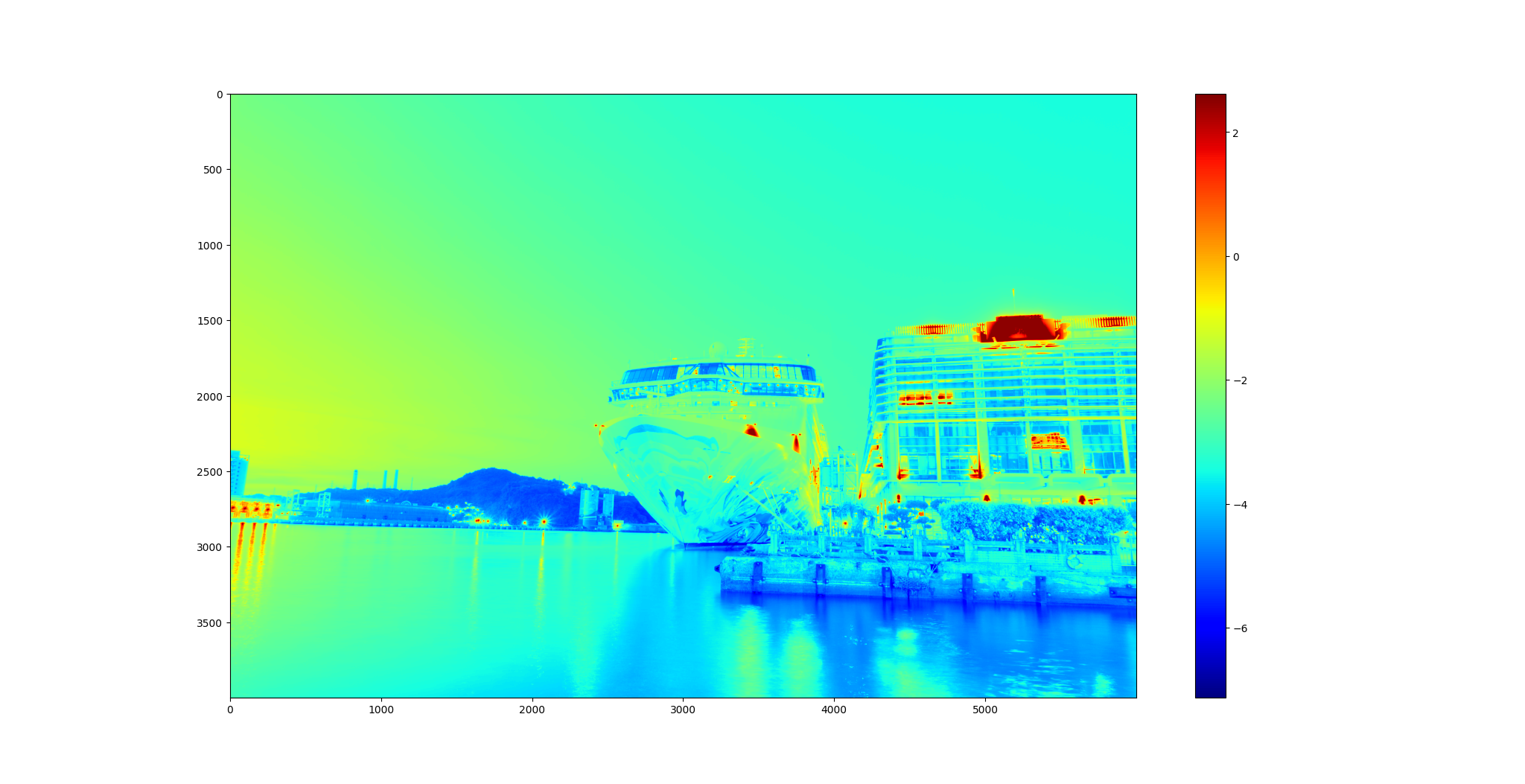
Radiance Map
HDR 結果

範例
原圖

Response Curve
Radiance Map
HDR 結果

Image Alignment
圖片對齊,先將所有圖片做 MTB,MTB 算法是將圖片轉成灰階後,對灰階值做排序,找到中值代表的顏色後,針對那個顏色對圖片做二值化,同時針對在 Threashold +- 10 的像素產生 Mask。
- MTB

- Mask
 之後對讀入的圖片依亮度做排序,選出中間值,作為 Reference image。並將所有圖片縮小 $2^{log2(min(height, width)) - 4}$ 倍。
之後對讀入的圖片依亮度做排序,選出中間值,作為 Reference image。並將所有圖片縮小 $2^{log2(min(height, width)) - 4}$ 倍。
以九宮格為移動方式 | -1, -1 | 0, -1 | 1, -1 | | :—-: | :—-: | :—-: | | -1, 0 | 0, 0 | 1, 0 | | -1, 1 | 0, 1 | 1, 1 |
將 MTB 圖片移動,對移動後的圖片做 a_img Xor b_img and mask,並取 sum(),找到 sum 最小的位置,將圖片移動。移動後,則將圖片解析度 ×2,重複以上動作直到回到圖片原始解析度大小。最終會得到圖片位移的 Offset,並依據這 Offset 做裁切。
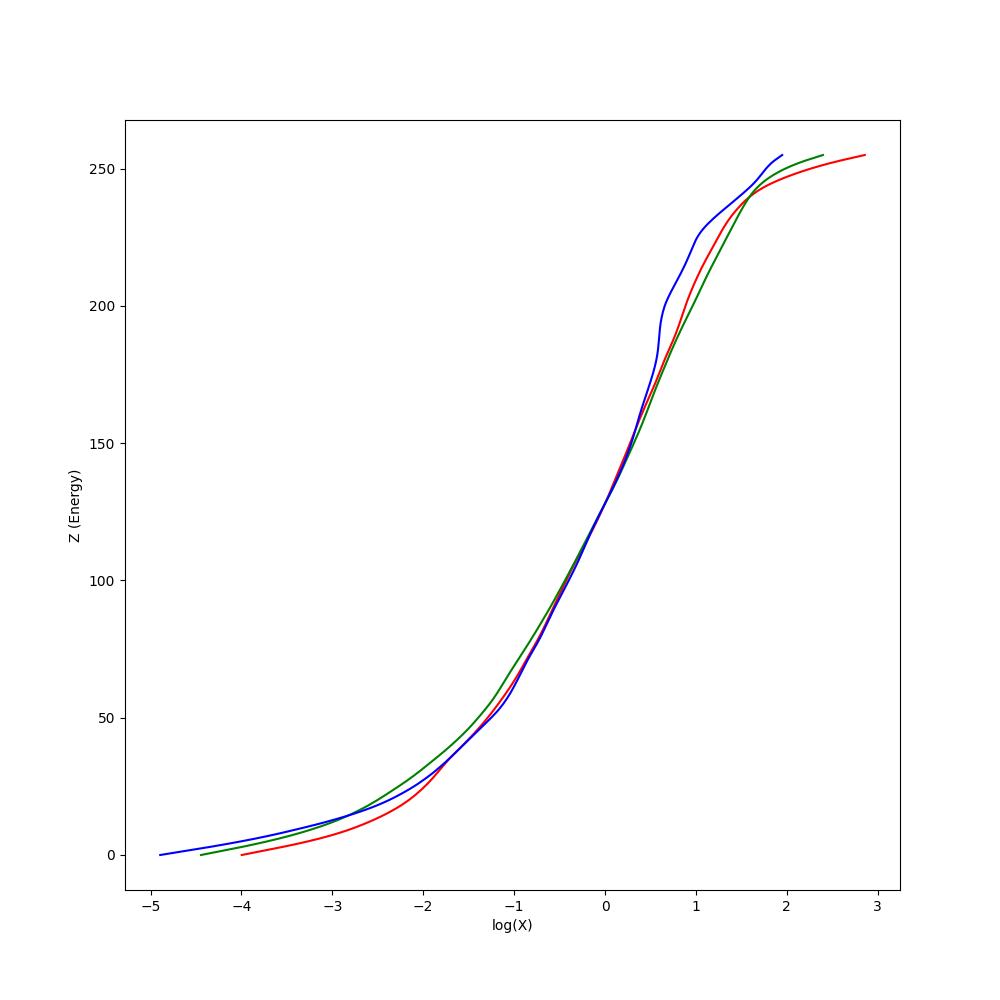
Response Curve
由於解 Response Curve 需要曝光時間作為參數,因此我們透過套件將圖片的 Exif 資訊讀入,可以拿到曝光時間。對其取 $log$ 後,對 RGB 三個 Channel 分別解 SVD,這邊主要參考論文附上的 Matlab Code。
x = np.linalg.lstsq(A, b, rcond=None)[0]
Response Curve
Sample 點部分有試過 Random 100 個點,以及將圖片縮到 10X10 去解,有發現縮到 10X10 的效果比較好。
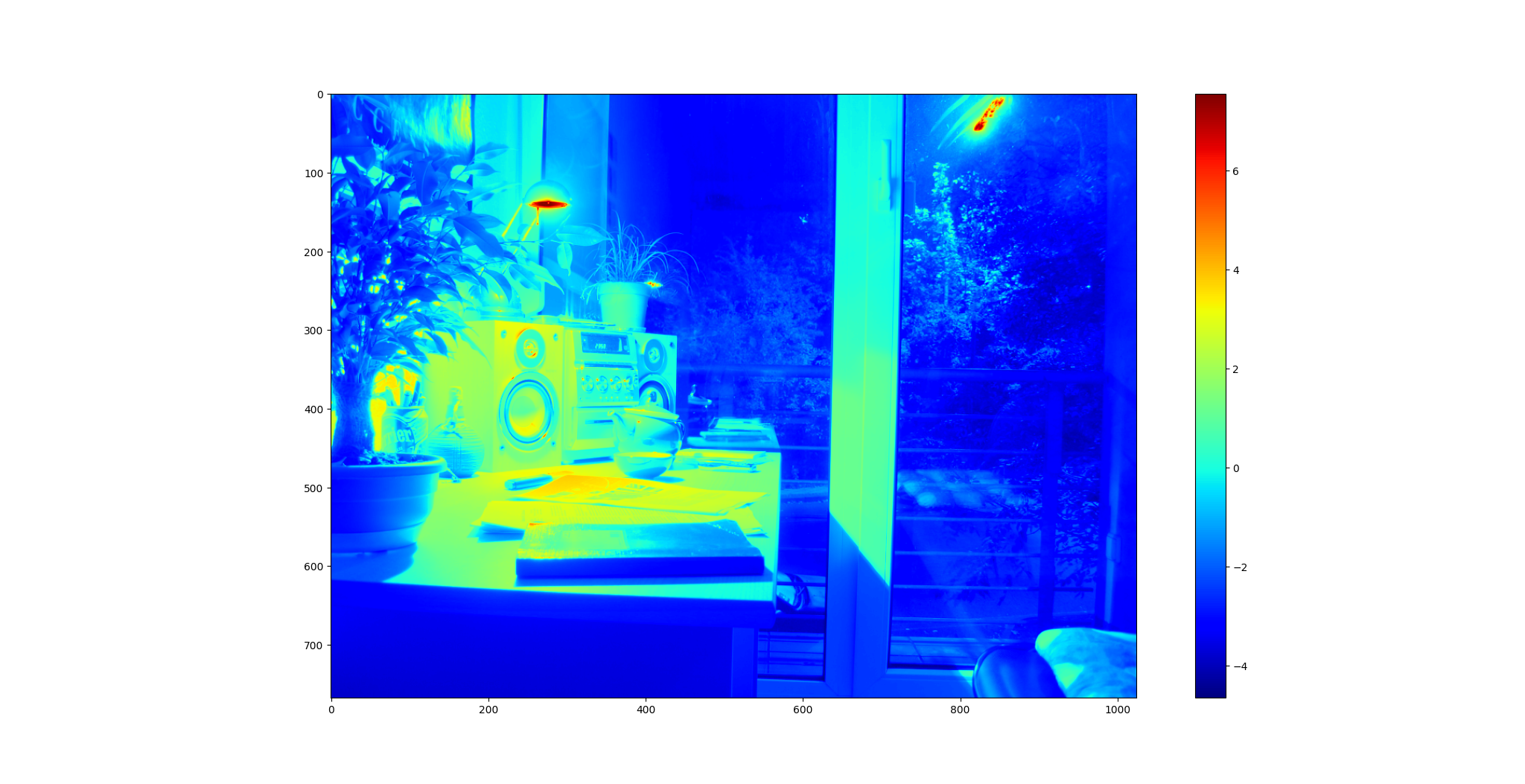
Radiance Map
Radiance Map 做法其實不難,照著公式實做就好,這邊遇到比較麻煩的問題是運算時間太久。一張 2400 萬畫素的圖片需要處理個 40 分鐘,因此後來將程式用 numpy 改寫,速度可以快到 40 秒內。
$ln E_i = \frac{\sum_{j=1}^P w(Z_{ij})(g(Z_{ij}) - ln\Delta t_j)}{\sum_{j=1}^P w(Z_{ij})}$
其中 g 函式即為剛剛求得的 Response Curve。
Tone Mapping
我們使用的Tone mapping演算法是Reinhard的版本。 基本上按照公式實作Global operator的部分:
-
首先計算整個場景的平均illuminance
$ \bar{L}w = \exp\begin{pmatrix}\frac{1}{N}\sum{x,y}log(\delta + L_w(x,y))\end{pmatrix}$
-
接著根據給定的key調整整個場景的亮度
$ L_m(x,y) = \frac{a}{\bar{L}_w} L_w(x,y)$
-
計算最後的結果,並將最亮的0.1% radiance mapping到1
$ L_d(x,y) = \frac{L_m(x,y)\begin{pmatrix}1+\frac{L_m(x,y)}{L_{white}^2(x,y)}\end{pmatrix}}{1+L_m(x,y)} $
其中 $L_{white}^2(x,y)$ 表示多少的radiance以上會被mapping到1
-
最後將結果從 [0, 1] mapping到可以顯示的RGB範圍 [0, 255]
result[:, :, 0] = np.minimum(Ld * radianceMap[:, :, 0] / Lw * 255, 255) result[:, :, 1] = np.minimum(Ld * radianceMap[:, :, 1] / Lw * 255, 255) result[:, :, 2] = np.minimum(Ld * radianceMap[:, :, 2] / Lw * 255, 255)
心得
這份作業運用了許多生成照片背後的原理,從中學習到了包含相機的pipeline、利用多張曝光照片估算HDR的技術,以及用來生成不同影像效果的 Tonemapping 演算法。
我們也實際走訪了城市,並使用實作好的程式生成了屬於自己的HDR照片,透過參數的fine tune,觀察同樣的圖片下生成的不同效果。
此外為了加速程式的運算效率,我們也研究了 numpy 的使用方式,避免使用多個巢狀 for 迴圈,因而造成計算時間過長。加速後效果也確實令人滿意。
留言